Botzilla 2003 pics
Click on the thumbnails blablabla.Again, for bigger pics and technical information, you should go here.
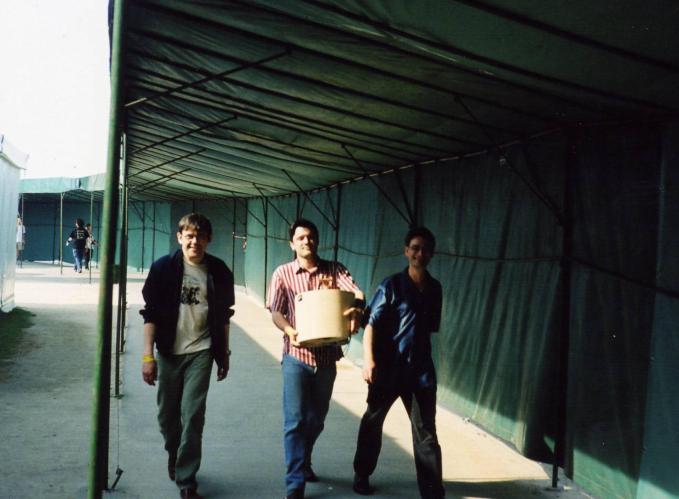
 The team.
On our booth. That's us. From left to right: Grégoire, I and Dominique. Grégoire is the application software guy. Dominique is our hardware specialist, for both electronic and mechanics. I take care of embedding and hard/soft integration. If you look closely, you can tell I'm an engineer: I've got a pen clipped on my shirt. And I wear glasses too.
The team.
On our booth. That's us. From left to right: Grégoire, I and Dominique. Grégoire is the application software guy. Dominique is our hardware specialist, for both electronic and mechanics. I take care of embedding and hard/soft integration. If you look closely, you can tell I'm an engineer: I've got a pen clipped on my shirt. And I wear glasses too.
 One of the competition hall.
This one is a gymnasium. Three buildings were used, one dedicated to the games, plus outdoors tent. 158 teams take a lot of place. Two teams per booth. With teams up to 20 members and a bonanza of hardware, this quickly turned to one of the most amazing and noisy chaos I ever saw. On the forefront a stage with some training fields.
One of the competition hall.
This one is a gymnasium. Three buildings were used, one dedicated to the games, plus outdoors tent. 158 teams take a lot of place. Two teams per booth. With teams up to 20 members and a bonanza of hardware, this quickly turned to one of the most amazing and noisy chaos I ever saw. On the forefront a stage with some training fields.
 Training fields.
In this very same gymnasium. Everything looks reasonably quite, this picture must have been taken during the very first hours.
Training fields.
In this very same gymnasium. Everything looks reasonably quite, this picture must have been taken during the very first hours.
 Let's work.
Day 1, evening. Electronic OK. Soft OK. But the casing of the robot, that plays a mechanical function in plucks management, has only been integrated this afternoon. Lot's of tweaking ahead.
Let's work.
Day 1, evening. Electronic OK. Soft OK. But the casing of the robot, that plays a mechanical function in plucks management, has only been integrated this afternoon. Lot's of tweaking ahead.
 Very, very late night 1.
This is no more tweaking, but real hacking on the case front opening. Here using an iron saw blade as a pluck deflector. If we're not ratified by winning a match alone in the field by tomorrow morning, we can go home and forget it. BTW the FAQuest of all FAQ that we were asked was: "how did you bent the wood?" (answer soon).
Very, very late night 1.
This is no more tweaking, but real hacking on the case front opening. Here using an iron saw blade as a pluck deflector. If we're not ratified by winning a match alone in the field by tomorrow morning, we can go home and forget it. BTW the FAQuest of all FAQ that we were asked was: "how did you bent the wood?" (answer soon).
Answer: this is a special kind of plywood, called "souplex" (in French). You can get some at any professional wood dealer. This is used for special, curved shape furniture like bars. Flexible as you can see.
 Ratifying.
Next morning. Alone on the field. Big relief: we did it. Now we're able to actually compete for the next three days.
Ratifying.
Next morning. Alone on the field. Big relief: we did it. Now we're able to actually compete for the next three days.
 Outdoor.
Ratifying was supposed to be easy this year, so it was decided that only three trials were allowed. It turns out that many teams (us included) had a terrible night fighting these ratifying problems. Everybody was a bit stunned, we chose to take a breath. Here a view of the main building.
Outdoor.
Ratifying was supposed to be easy this year, so it was decided that only three trials were allowed. It turns out that many teams (us included) had a terrible night fighting these ratifying problems. Everybody was a bit stunned, we chose to take a breath. Here a view of the main building.
 Too bad.
The surrounding is really nice with a lake just behind and a leisure base. Unfortunately none enjoyed these, except the support teams (family, friends, significant others).
Too bad.
The surrounding is really nice with a lake just behind and a leisure base. Unfortunately none enjoyed these, except the support teams (family, friends, significant others).
 Back to work.
On an outdoor training field near our booth. By this time we had decided to cut the pluck-stacking feature, which explain the weird looking opening on the front. Well OK, that's also the result of our nightly hacking. No more stacks: the robots could be much smaller now.
Back to work.
On an outdoor training field near our booth. By this time we had decided to cut the pluck-stacking feature, which explain the weird looking opening on the front. Well OK, that's also the result of our nightly hacking. No more stacks: the robots could be much smaller now.
 Welcomed shadow.
Other teams enjoy these outdoors field too. Barefoot laptop computing. Weather is fine but very hot.
Welcomed shadow.
Other teams enjoy these outdoors field too. Barefoot laptop computing. Weather is fine but very hot.
 Our booth neighbors from ENST.
We shared our booth with the Ecole Nationale Supérieure des Télécommunications de Bretagne (French Britain National Telecommunication School). Here Guillaume, the software guy.
Our booth neighbors from ENST.
We shared our booth with the Ecole Nationale Supérieure des Télécommunications de Bretagne (French Britain National Telecommunication School). Here Guillaume, the software guy.
 Some more tweaks
on the color detection system after some tests under the sun.
Some more tweaks
on the color detection system after some tests under the sun.
 Yes it can be done.
Zedix came to the competition with an original system, 100% Lego® based. Three independent RCX modules are used, cross-development is done using brickOS under Linux. This work surprisingly well and proved quite solid. The drawbacks is that's it's too light and slow in front of most mammoth robots.
Yes it can be done.
Zedix came to the competition with an original system, 100% Lego® based. Three independent RCX modules are used, cross-development is done using brickOS under Linux. This work surprisingly well and proved quite solid. The drawbacks is that's it's too light and slow in front of most mammoth robots.
 Backstage.
Behind the curtain, waiting before getting on stage.
Backstage.
Behind the curtain, waiting before getting on stage.
 Show time!
The stage, with 5 files used simultaneously.
Show time!
The stage, with 5 files used simultaneously.
 Nobody's laughing now.
We loosed the first game.
Nobody's laughing now.
We loosed the first game.
 Let me see...
Let me see...
 Another veteran team,
with a funny robot (on the right) somehow looking like a Tinguely sculpture. Full of humor, original and efficient.
Another veteran team,
with a funny robot (on the right) somehow looking like a Tinguely sculpture. Full of humor, original and efficient.
 The show goes on.
The show goes on. Another game.
Another game.
 Zedix,
the young Lego® Jedi, interviewed by a French television reporter.
Zedix,
the young Lego® Jedi, interviewed by a French television reporter.
 Finished.
4 days, 5 games, a decent score, we did it. Back to the both from the stage hall.
Finished.
4 days, 5 games, a decent score, we did it. Back to the both from the stage hall.
Before all this


 Hardware home lab.
This is where the creature was born. At least in its physical form, I mean.
Hardware home lab.
This is where the creature was born. At least in its physical form, I mean.

 Prototypes views
at different stages of the development. No, it does not weight 10 kg: look at the tare weight.
Prototypes views
at different stages of the development. No, it does not weight 10 kg: look at the tare weight.